Sangjin Ryu1 & Kiyotaka Obunai2
1Department of Mechanical and Materials Engineering, University of Nebraska-Lincoln, Lincoln, NE, USA. 2Department of Mechanical and Systems Engineering, Doshisha University, Kyoto, Japan.
Emails: sryu2 (at) unl (dot) edu; kiobunai (at) mail (dot) doshisha (dot) ac (dot) jp
Robots have been a very popular theme of Japanese animation, or anime, since the success of Mazinger Z in the early 1970’s. This genre of anime is called robot anime or mecha anime. Well-known robot anime series include Nagai Go’s Mazinger series, Tomino Yoshiyuki’s Gundam series, Kawamori Shoji’s Macross series, and Anno Hideaki’s Evangelion series. These anime robots take the general humanoid form, which resembles the human body because they usually have a head with eyes (sometimes even nose and mouth), one torso, two arms, and two legs. Anime robots are categorized into two groups: super robot (Fig. 1A) and real robot (Fig. 1B) (Wikipedia, 2024). In general, super robots are imaged as gigantic superheroes with incredible powers, and real robots are treated as mass-produced weapons governed by seemingly realistic technological limitations.

The two anime robot groups contrast to each other quite distinctively from mechanical engineering perspectives as follows (TV Tropes 2024a, 2024b). The common features of super robots include: (1) super robots are often the creations of mad scientists and engineers who work alone or as a small team, aliens, or an ancient civilization; (2) super robots are usually gigantic and powered by mystical energy sources; (3) super robots are controlled by a relatively simple system such as a handful of buttons and a joystick, motion capture, voice command, or direct link to the mind or brain of the pilot; and (4) the motion of super robots is unrealistically humanlike, such as running, jumping, and kicking (Fig. 1A).
By contrast, realism is emphasized for the real robot group, although they are still fictional. The common features of real robots are: (1) real robots are designed, developed, tested, and mass-produced by governments or large commercial corporations; (2) real robots are often developed through stages of prototype, test-type, and mass-production types; (3) real robots rely on largely conventional, yet futuristic, power sources; (4) real robots require periodic extensive maintenance and the logistics to supply fuel, ammunition, and spare parts; (5) real robots happen to malfunction and break down; (6) real robots use scaled-up and advanced versions of infantry ranged weapons, which require ammunition cartridges; and (7) real robots use an elaborate system of controls for manual operation. As such, real robots are usually smaller and less powerful than super robots.
Japanese anime robots have various sizes, ranging from a few meters to several hundred meters (Fig. 1C). Similarly, their mass varies over a wide range. As researchers and educators in mechanical engineering, we question whether there exists any relationship between the height and mass of anime robots. As such, the main research question of this study is whether anime robots show any scaling relationship between their height and mass and whether anime robots are isometric or allometric.
ISOMETRY VS ALLOMETRY
A scaling relationship between size and mass can be exemplified by the following cube example (McMahon & Bonner, 1983; Schmidt-Nielsen, 1984; Vogel, 2013). In this example, we are going to find a relationship between the size and mass of cubes of various sizes. As shown in Fig. 2A, we start with a cube with the height of 1. The volume of this unit cube is 1, and if the density of the cube is assumed to be 1, then the mass of the cube is 1. The next step in this example is to double the height of the cube by stacking up eight unit cubes. Simply, the second cube is two times larger than the unit cube in terms of the size. However, its volume, and thus mass, have increased by a factor of 8 (= 23). As the cube size is tripled, the height and mass of the cube becomes 3 and 27, respectively.
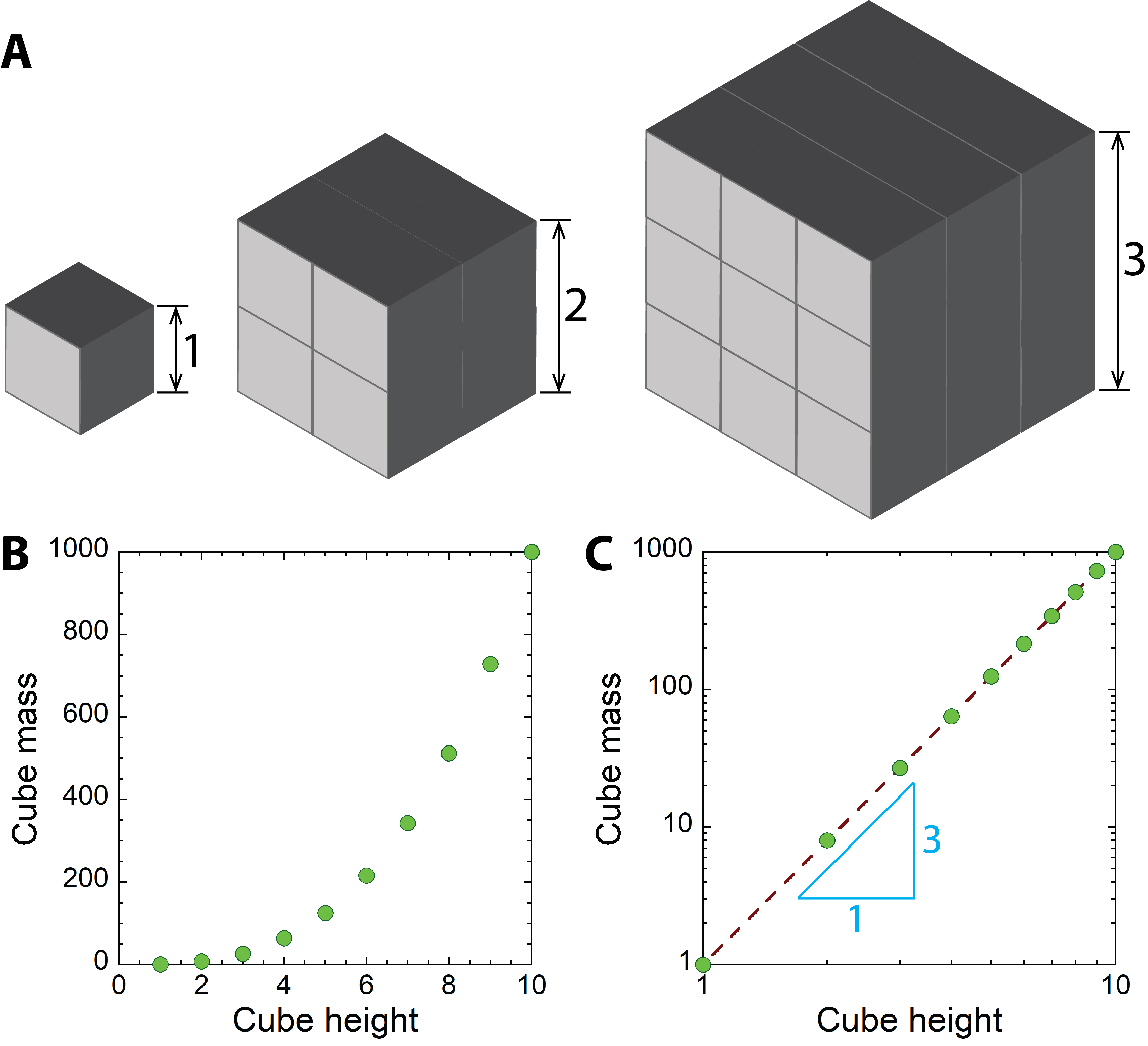
Figure 2B visualizes how the mass of the cube (m) increases with the height (h). As h increases from 1 to 10, m increases from 1 to 1,000. Since the data points form a curvy alignment, it is hard to find any clear relationship between m and h. When the same data are plotted in the logarithmic scale as shown in Figure 2C, all the data points are aligned on a single straight line. Because the slope of the line is 3, this line means log(m) ~ 3log(h), which is equal to m ~ h3. Thus, the scaling relationship between the mass and height of the cubes is found to be m ~ h3. This scaling relationship is known as the cube law (Froese, 2006).
The found relationship means that as the size of the cube increases, its mass also increases when a constant density is assumed. This finding is quite obvious because the mass of a cube with the height h is proportional to its volume h3. Thus, it can be easily found that when the cube size increases by a factor of n, its mass increases by a factor of n3. The found relationship is called geometric isometry, and the cubes are isometric because their shapes are identical with the same proportion regardless of their size.
Isometry is also found for the human body. According to data collected by various life insurance companies, the following relationship was found between the height and mass of humans: m ~ h2.9 (McMahon & Bonner, 1983). It is noticeable that the scaling exponent is very close to that of the cube example. Because our bodies have similar proportions and similar density, human bodies follow the isometric relationship between the height and mass.
Now, we are going to change the way we stack up the unit cubes. As Figure 3A shows, each layer has a different number of the unit cubes, and the number increases from the top to the bottom layer by one, like an arithmetic sequence. The stacks in Figure 3A have the same heights as Figure 2A, but their mass differs because the total number of the unit cubes is different. When the mass of the cube stacks is plotted with their height in the logarithmic scale, all the data points appear to be aligned on a single straight line as shown in Figure 3B. The slope of the data points is found to be 1.75, which shows that the mass of the cube stack increases with their height following m ~ h1.75. In this case, the scaling exponent is not 3. Because the proportion of the cube stacks changes as they get higher, as shown in Figure 3A, the found scaling exponent is different from that of the isometric cubes shown in Figure 2. This non-isometric scaling relationship found for the second case is called allometry (Schmidt-Nielsen, 1984).

Most anime robots have similar body structures to the human body, as shown in Figure 1, and thus they are expected to have similar proportions regardless of whether they are super robots or real robots. Then, it can be hypothesized that Japanese anime robots are isometric like humans. This hypothesis can be examined by finding proportions of anime robots, but unfortunately only their height information is available, whereas other dimensions such as leg length and body width are unknown. This is understandable because the height of robots is the physical dimension that viewers can feel on screen. Therefore, this study examined that hypothesis by using currently available height and mass data of anime robots, and by finding scaling exponents between them.
MATERIALS AND METHODS
One can find specification information of anime robots on the internet, but often those values could vary depending on sources. Instead of using values found in online sources, we used published reference books about anime robots (Studio Hard MX, 1997; Media Works, 2003, 2004; Office J.B, 2012a, 2012b; Sunplant, 2013).
From these books, we chose 190 super robots and 210 real robots that appeared in anime from 1963 to 2003 and organized their data of height and mass. Some robots had different values between reference books. In such cases, the average value was found and used in this study. The following units were used in this study: meter (m) for height and ton (t) for mass (1 t = 1,000 kg). The specifications of some robots are given in fictional units, and they are included in this study if conversion factors are known. For certain real robots such as Gundam, two different mass values are shown in the reference books: body weight and gross weight. Because gross weight includes the mass of weapons and accessory equipment, only body weight values were considered in this study.
The scaling exponent between height and mass was found by fitting m = ahb against the data using the method of least squares. Here, b is the scaling exponent of our interest, and if the found value of b is close to 3, anime robots will be found to be isometric.
RESULTS AND DISCUSSION
Figure 4A compares the height and mass distribution between the super robot group and the real robot group. Although the ranges of height and mass differ between the two groups, they agree well with each other for the height range of 5–100 m. Overall, their mass increases with height.

Table 1 compares the statistics of height and mass between the two groups. The super robot group has wider ranges both for height and mass than the real robot group, as shown by the respective maximum and minimum values. This is mainly because of one outlier in the super robot group: Macross from Super Dimension Fortress Macross. This humongous robot is actually an alien space battleship that fell to Earth from outer space. When this battleship transforms into the humanoid form, which is known as the Storm Attacker mode, it becomes a robot that is 1,800 m in height and 18 million tons in mass. One may argue that the real robot group also has one outlier, which is Iron-Gear from Xabungle. This gigantic hovercraft-type battleship can also transform to a humanoid form, and it is 128.6 m in height and 49,890 t in mass. Although Iron-Gear is gigantic, it is much smaller than Macross since the former is 14 times shorter and 360 times lighter than the latter.
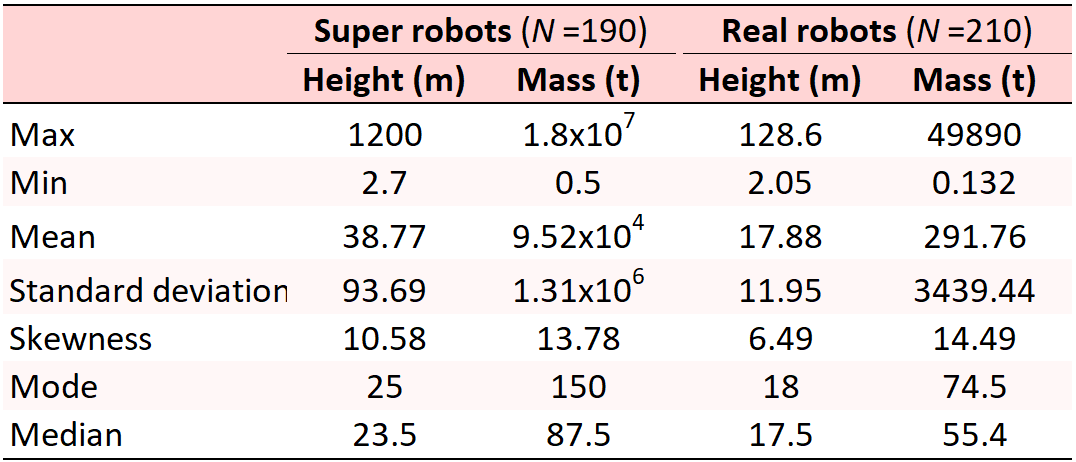
It is harder to grasp a physical sense of mass than height because we can easily sense length dimensions using our vision. The following machines can serve as references. Typical passenger cars weigh 2 t in average, and fully loaded dump trucks mass about 40 t. Boeing 777 series are one of the biggest aircrafts in the world, and their empty operating mass ranges from 135 t to 168 t. Then, what is the heaviest movable machine of human civilization? The answer is aircraft carriers. The U. S. Navy Nimitz class aircraft carrier is one of the largest ships, and each ship is about 325 m long and 99,000 t heavy. Since Iron-Gear is shorter and lighter than Nimitz class aircraft carriers, its size and mass seem somewhat realistic although it is still questionable to fly such a heavy machine in the air. In contrast, Macross is very unrealistic because Macross is equal to a pile of 182 Nimitz class aircraft carriers in terms of mass.
In general, super robots are taller and heavier than real robots in all metrics, which are mean, mode, and median. Because of the high standard deviation and skewness of height and mass, it appears more reasonable to use mode and median rather than mean. Both super and real robot groups have similar mode and median values in each group for height. Super robots are mostly 24–25 m tall while real robots are mostly about 18 m tall. However, the two groups are different in terms of mass because the real robot group has closer mode and median than the super robot group does. It is probably because 69% of the examined real robots are from the Gundam series. In this most famous real robot series, many robots, which is called Mobile Suits, are about 18 m in their height.
In Figure 4A, both groups exhibit roughly linear trends between height (h) and mass (m) when plotted in the logarithmic scale. As shown in Figure 4B and C, the obtained values of m and h are similar between the two groups: m = 0.24h1.88 for super robots, and m = 0.11h2.09 for real robots. This similarity was expected from the good agreement between the two groups shown in Figure 4A. These curve fitting results show that super robots roughly follow m ~ h1.88 and real robots m ~ h2.09. Since the exponent values are close to 2, the mass of robots in Japanese animation can be thought to increase with their height following m ~ h2 regardless of types. Truly the line of m ~ h2 well represents all the data collected for this study as shown in Figure 4A. Because the found scale exponents are not 3, anime robots exhibit allometric relationships between their height and mass regardless of their type, and the main hypothesis of this study is found to be wrong.
Here, it needs to be reminded that a constant density was assumed for finding the isometry of cubes in the same shape: the cubes were made of the same material and thus they have the same density. For the aforementioned isometry of human height and mass (i.e., m ~ h2.9), it is reasonable to assume that the body density of humans is constant because the materials that make up the human body are the same and their compositions are similar across individuals. The same goes for the isometry of various animals. Regarding anime robots, however, their body density appears to vary significantly because those robots are constructed with all different types of substances. The following are some examples: Super-Alloy Z for Mazinger Z, Gundarium for First Gundam, and Ideonite for Ideon. More surprisingly, Aurora Battlers like Dunvine are made up of materials obtained from animals. Since materials for anime robots are all different, it is reasonable to assume that their densities are also different.
Moreover, anime robots usually have cavities or empty spaces in their body to accommodate pilots and to store weapons and fuel, similar to real-world vehicles (of course, no weapons in real-world vehicles). In fact, the relationship between the mass and length of typical passenger vehicles is approximately m ~ h1.85, which is very similar to the scaling relationship found for anime robots. Because most cars have a stressed skin structure (i.e., monocoque), their mass is mainly proportional to the body surface area. Let’s return to the isometric cube example in Figure 2. If these cubes are assumed to have a shell structure with a constant thickness, their mass increases with the surface area, which results in m ~ h2. The similarity in the scaling relationships between anime robots, passenger vehicles, and empty isometric cubes suggests that the cavities in anime robot’s body is responsible for the found allometry of anime robots, despite their similar shapes and proportions, along with variations in the material density.
Our finding suggests how Tomotani can improve his estimation of the mass of anime robots (Tomotani, 2016). Tomotani estimated the mass of AMT-09-ST Scopedog (h = 3.8 m) and RX-78-2 First Gundam (h = 18 m) using the cube law assuming isometry of robots. His estimations quite differed from the official specifications: 3.9 t vs. 6.4 t for Scopedog, and 445 t vs. 60 t (gross weight) for First Gundam. Tomotani attributed the discrepancy to “unknown material” used for robots, as we pointed out. Tomotani may be able to estimate the mass of anime robots and Tengen Toppa Gurren Lagann more reasonably by using the scaling relationship of m ~ h2 found in this study.
ARE ANIME-ROBOT-LIKE ROBOTS POSSIBLE IN THE REAL WORLD?
One may question whether robots like anime robots are possible in the real world. Japan has a few real scale (i.e., 1:1 scale) Gundams at various cities including First Gundam in Yokohama, Unicorn Gundam in Tokyo, and n Gundam in Fukuoka, as shown in Figure 5. These real scale Gundams can move parts of their body. As shown in Figure 5A, Unicorn Gundam transforms between the unicorn mode and the destroy mode. n Gundam in Figure 5B can move its head and one arm. However, they are fixed on the ground. In other words, they are more like moving statues rather than robots.

It is too early to be disappointed because several humanoid-type robots have been developed by various industry and academia sectors. Popular two-legged real-world robots include Asimo of Honda (Japan), Atlas of Boston Dynamics (USA), T-HR3 of Toyota (Japan), and Apollo of Apptronik (USA) as shown in Figure 6A–D. Since these robots are 1.3–1.7 m tall and 50–90 kg heavy, they are smaller than average adults but still as heavy as average adults. So, these humanoid robots are like Astro Boy Atom.
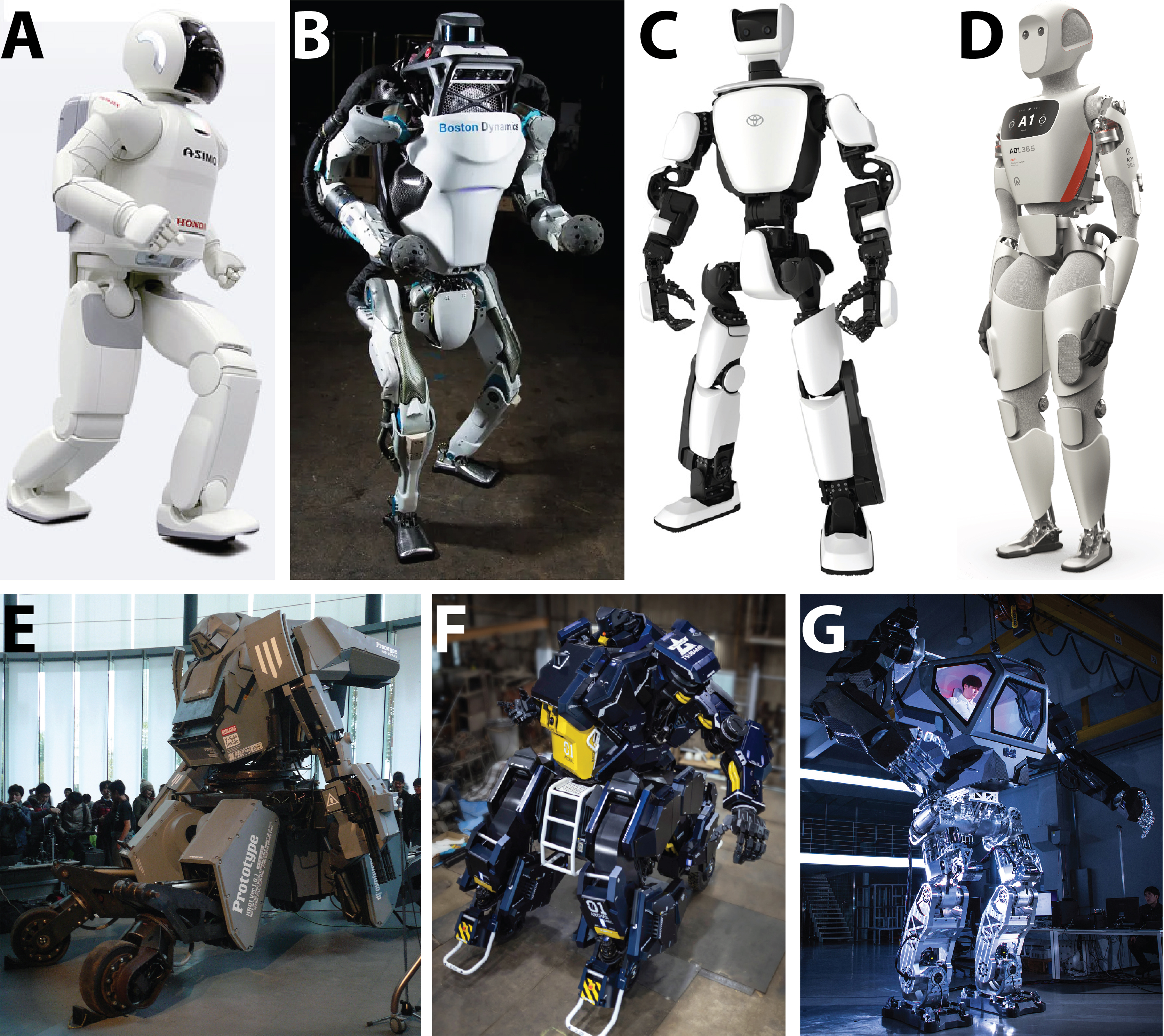
Bigger robots do exist in the real world. Suidobashi Heavy Industry (Japan) invented Kuratas (Fig. 6E), which is about 4 m in height and about 4.5 t in mass. Kuratas had a price tag of about USD 1.4 million in 2013. Similar robots were made by MegaBots (USA), and MegaBots robots challenged Kuratas for duels. Recently, Tsubame Industry (Japan) introduced Archax (Fig. 6F). This 3-million-dollar robot is 4.5 m in height and 3.5 t in mass. These robots are much heavier than humanoid robots. Considering their heavy mass, it seems unrealistic for them to walk. As such, these robots are wheeled for mobility like Guntank and Getter-3.
Method-2 of Korea Future Technology (South Korea) can walk (Fig. 6G). Being 4.2 m in height, Method-2 is similar to Kuratas and Archax in size. However, Method-2 is much lighter because it weighs about 1.6 t including a human pilot. Although Method-2 is a real-world robot most similar to anime robots so far, it is actually more like Amplified Mobility Platform featured in the movie Avatar (20th Century Fox, 2009).
These examples of real-world robots are compared with anime robots in Figure 4A. Similar to anime robots, real-world robots get heavier as they get bigger. It is quite surprising that the real-world robot group agrees relatively well with the anime robot groups. This agreement suggests that for the height range of 1–5 m, the height and mass of anime robots are somewhat realistic.
CONCLUSION
The super and real robots featured in Japanese animation are mostly of humanoid form, mimicking the human body. Their similar proportions suggest that these anime robots are isometric. This hypothesis was examined by finding power-law scaling relationships between the height and mass of anime robots. Such analyses found that the mass of anime robots roughly increases with their height with a power of 2. Because the found scaling exponent significantly differs from 3, which is the expected exponent value for isometry, anime robots are allometric regardless of their type. Considering that isometry between mass and height assumes constant density, the found allometry of the anime robots suggests that their body densities are not constant, which is supported by the variety of materials used for anime robots.
REFERENCES
Froese, R. (2006) Cube law, condition factor and weight–length relationships: history, meta‐analysis and recommendations. Journal of Applied Ichthyology 22(4): 241–253.
McMahon, T. & Bonner, J.T. (1983) On Size and Life. W. H. Freeman & Co., New York.
Media Works. (2003) 機動戦士ガンダム MS大全集2003. Mobile Suit Illustrated 2003. Kadokawa Shoten, Tokyo.
Media Works. (2004) スーパーロボット大鑑 Ver.2004. Super Robot Encyclopedia Ver.2004. Kadokawa Shoten, Tokyo.
Office J.B. (2012a) 戦え!全日本アニメロボ大全集 70~80年代篇 [All Japan Anime Robo Complete Works 70-80’s Edition]. Futabasha, Tokyo.
Office J.B. (2012b) 戦え!全日本アニメロボ大全集 90年代篇 [All Japan Anime Robo Complete Works 90’s Edition]. Futabasha, Tokyo.
Schmidt-Nielsen, K. (1984) Scaling. Why is Animal Size so Important? Cambridge University Press, Cambridge.
Sunplant. (2013) スーパーロボット画報2 ― 巨大ロボットアニメ三十五年の歩み. The Super Robots Chronicles Ver.2. The History of Japanese Super Robots Animations, 1998-2013. Takeshobo, Tokyo.
Studio Hard MX. (1997) スーパーロボット画報―巨大ロボットアニメ三十五年の歩み. The Super Robots Chronicles. The History of Japanese Super Robots Animations, 1963-1997. Takeshobo, Tokyo.
Tomotani, J.V. (2016) Is the great attractor a Tengen Toppa Gurren Lagann? Journal of Geek Studies 3(1): 35–44.
TV Tropes. (2024a) Real Robot Genre. Available from https://tvtropes.org/pmwiki/pmwiki.php/Main/RealRobotGenre (Date of access: 17/Feb/2024).
TV Tropes. (2024b) Super Robot Genre. Available from https://tvtropes.org/pmwiki/pmwiki.php/Main/SuperRobotGenre (Date of access: 17/Feb/2024).
Vogel, S. (2013) Comparative Biomechanics. Life’s Physical World. Princeton University Press, Princeton.
Wikipedia. (2024) Mecha anime and manga. Available from https://en.wikipedia.org/wiki/Mecha_anime_and_manga (Date of access: 17/Feb/2024).
Acknowledgements
SR appreciates Madoka Wayoro and the Kawasaki Reading Room of the University of Nebraska-Lincoln for their support for his Professor Otaku lecture series. We appreciate Jonh J. Socha and Carson Emeigh for proofreading and comments.
About the authors
Dr. Sangjin Ryu is a researcher and educator in mechanical engineering and studies various fluid phenomena at various scales. He is also known as Professor Otaku for his informal lectures on mechanical engineering using examples found in Japanese animation.
Dr. Kiyotaka Obunai is currently a Professor in the Faculty of Science and Engineering at Doshisha University and a Visiting Adjunct Faculty Member in the Department of Mechanical and Materials Engineering at the University of Nebraska-Lincoln. His research interests include materials science and mechanical engineering, and how mechanical engineering is treated in Sci-Fi works, including anime.